If we need to design governance that influences attention, then it matters if we know or not the goal of the decision maker. This text provides a simple simulation that illustrates the differences between the time it takes for the decision maker to reach the goal in both cases, all else being equal.
This text is part of the series on decision governance. Decision Governance is concerned with how to improve the quality of decisions by changing the context, process, data, and tools (including AI) used to make decisions. Understanding decision governance empowers decision makers and decision stakeholders to improve how they make decisions with others. Start with “What is Decision Governance?” and find all texts on decision governance here.
If the designer knows the goal that the decision maker is pursuing, the problem consists of designing rules which steer the decision maker towards the known goal. This was illustrated already in the Governance of attention case, in another text, here.
What if the designer does not know the decision maker’s goal? The general idea is that governance should involve a feedback loop that helps the decision maker in their search. This can work as follows.
- Governance includes a hypothesis about what the goal may be, or what characteristics it has in case the designer does not want to guess the exact goal.
- Governance includes a procedure to steer the decision maker’s attention towards the hypothesized goal, in the cheapest and/or fastest way to determine if that is in fact the goal.
- If the result of step 2 is that the goal is reached, that’s it, the search stops; if not, then governance needs to include a procedure that sets a new hypothesis about what the goal is, and initiates a new search.
As in other texts with simulations, here, let’s start with a simple known search space represented as a grid, and say that the decision maker starts from the upper left corner.
If we are designing governance and don’t know the goal cell, then we can assume something about it and steer the agent’s search accordingly. For example, we might assume one of the following.
- The goal is far away from the start, and the rule is to search from the outside in, across the search space.
- We don’t know anything about where the goal may be, but we know that it will be found if every position in the search space is visited, and to minimize time required to find the goal, the decision maker should not revisit positions (this influences the path to direct the agent onto).
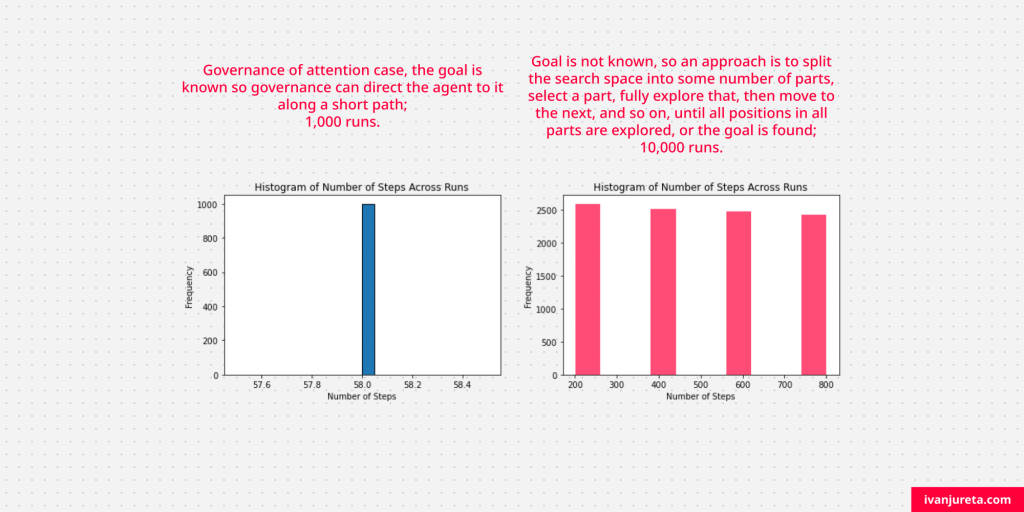
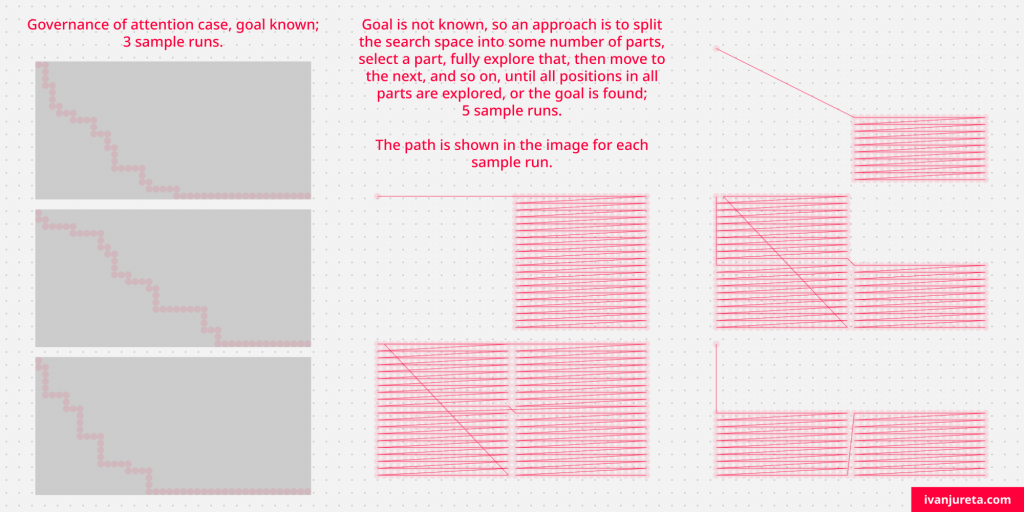
- We split the search space into some number of parts, select a part, fully explore that, then move to the next, and so on, until all positions in all parts are explored, or the goal is found.
Let’s take the third assumption, that the search space has parts. The governance framework is as follows:
- The grid (search space) is divided into 4 parts, obtained by dividing the grid in half horizontally and vertically.
- Label each part of the grid with a number from 1 to 4.
- Randomly order the labels of grid parts.
- In the given order of grid parts, draw the agent’s attention to move to the first cell of the grid part, which is the upper left corner cell of the grid part.
- Once the agent is in the first cell of the grid part, direct the agent’s attention so it traverses all cells in the grid part, without revisiting a cell.
- If the agent reached the goal cell, stop. If the agent traversed all cells in the grid part and did not reach the goal cell, then direct the agent to move to the first cell of the next grid part.
Below are histograms of numbers of steps across 1,000 and 10,000 runs for the case when attention is drawn to the known goal, and when the goal is not known. The difference is obvious.
The image below shows sample runs for each of the two cases. In an image, if an agent visited the cell, then a circle is drawn in the cell, and the more times the agent visited that cell, the less transparent the color of the circle. For the case when the goal is not known, the path is also shown.
Code for simulations is available at github, here.
Decision Governance
This text is part of the series on the design of decision governance. Other texts on the same topic are linked below. This list expands as I add more texts on decision governance.
- Introduction to Decision Governance
- Stakeholders of Decision Governance
- Foundations of Decision Governance
- How to Spot Decisions in the Wild?
- When Is It Useful to Reify Decisions?
- Decision Governance Is Interdisciplinary
- Individual Decision-Making: Common Models in Economics
- Group Decision-Making: Common Models in Economics
- Individual Decision-Making: Common Models in Psychology
- Group Decision-Making: Common Models in Organizational Theory
- Role of Explanations in the Design of Decision Governance
- Design of Decision Governance
- Design Parameters of Decision Governance
- Factors influencing how an individual selects and processes information in a decision situation, including which information the individual seeks and selects to use:
- Psychological factors, which are determined by the individual, including their reaction to other factors:
- Attention:
- Memory:
- Mood:
- Emotions:
- Commitment:
- Temporal Distance:
- Social Distance:
- Expectations
- Uncertainty
- Attitude:
- Values:
- Goals:
- Preferences:
- Competence
- Social factors, which are determined by relationships with others:
- Impressions of Others:
- Reputation:
- Promises:
- Social Hierarchies:
- Social Hierarchies: Why They Matter for Decision Governance
- Social Hierarchies: Benefits and Limitations in Decision Processes
- Social Hierarchies: How They Form and Change
- Power: Influence on Decision Making and Its Risks
- Power: Relationship to Psychological Factors in Decision Making
- Power: Sources of Legitimacy and Implications for Decision Authority
- Power: Stability and Destabilization of Legitimacy
- Power: What If High Decision Authority Is Combined With Low Power
- Power: How Can Low Power Decision Makers Be Credible?
- Social Learning:
- Psychological factors, which are determined by the individual, including their reaction to other factors:
- Factors influencing information the individual can gain access to in a decision situation, and the perception of possible actions the individual can take, and how they can perform these actions:
- Governance factors, which are rules applicable in the given decision situation:
- Incentives:
- Incentives: Components of Incentive Mechanisms
- Incentives: Example of a Common Incentive Mechanism
- Incentives: Building Out An Incentive Mechanism From Scratch
- Incentives: Negative Consequences of Incentive Mechanisms
- Crowding-Out Effect: The Wrong Incentives Erode the Right Motives
- Crowding-In Effect: The Right Incentives Amplify the Right Motives
- Rules
- Rules-in-use
- Rules-in-form
- Institutions
- Incentives:
- Technological factors, or tools which influence how information is represented and accessed, among others, and how communication can be done
- Environmental factors, or the physical environment, humans and other organisms that the individual must and can interact with
- Governance factors, which are rules applicable in the given decision situation:
- Factors influencing how an individual selects and processes information in a decision situation, including which information the individual seeks and selects to use:
- Change of Decision Governance
- Public Policy and Decision Governance:
- Compliance to Policies:
- Transformation of Decision Governance
- Mechanisms for the Change of Decision Governance